|
|

|

|
| e-Pub |
Section: New Results
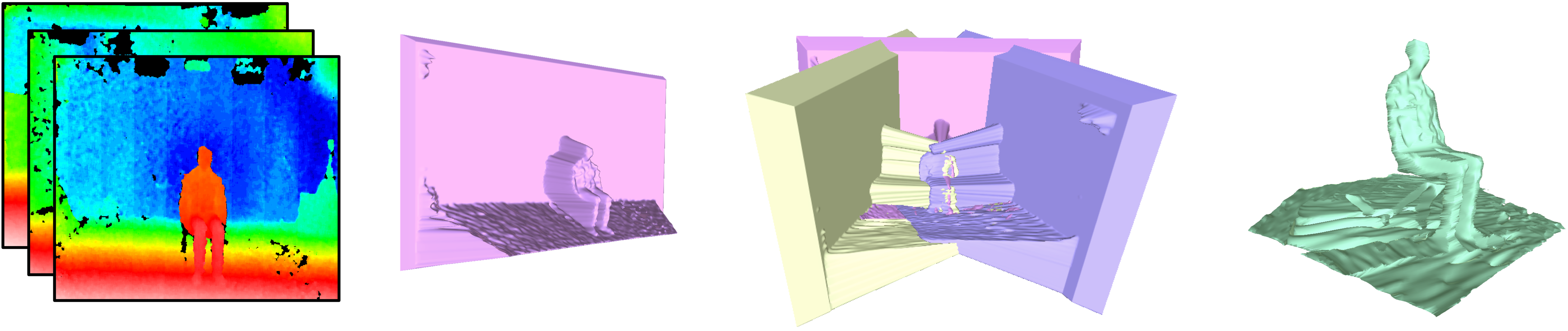
3D shape cropping
We introduce shape cropping as the segmentation of a bounding geometry of an object as observed by sensors with different modalities. Segmenting a bounding volume is a preliminary step in many multi-view vision applications that consider or require the recovery of 3D information, in particular in multi-camera environments. Recent vision systems used to acquire such information often combine sensors of different types, usually color and depth sensors. Given depth and color images we present an efficient geometric algorithm to compute a polyhedral bounding surface that delimits the region in space where the object lies. The resulting cropped geometry eliminates unwanted space regions and enables the initialization of further processes including surface refinements. Our approach exploits the fact that such a region can be defined as the intersection of 3D regions identified as non empty in color or depth images. To this purpose, we propose a novel polyhedron combination algorithm that overcomes computational and robustness issues exhibited by traditional intersection tools in our context. We show the correction and effectiveness of the approach on various combination of inputs. This work was presented at the Vision Modeling and Visualization workshop 2013 [6] .